

베스트셀러 상품
-

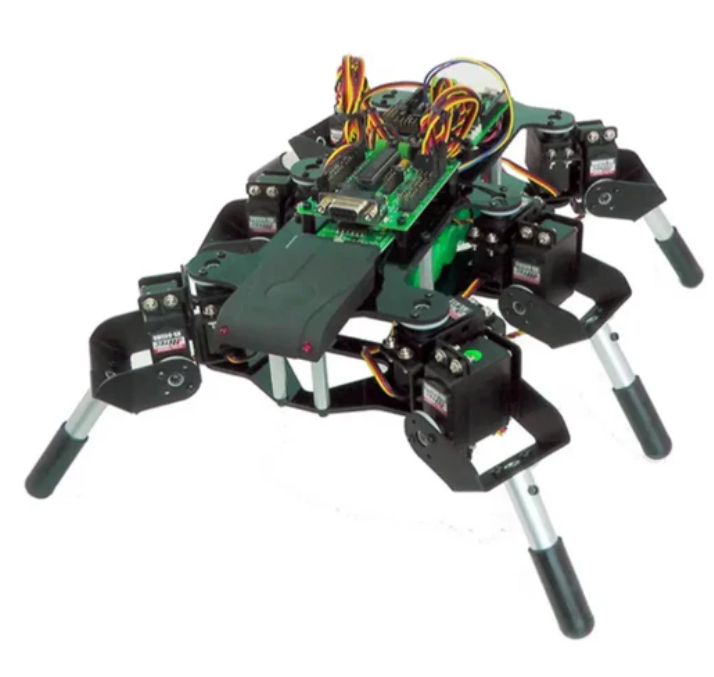
ROBOTIS BIOLOID 고급 의인 로봇 키트
$1,299.90



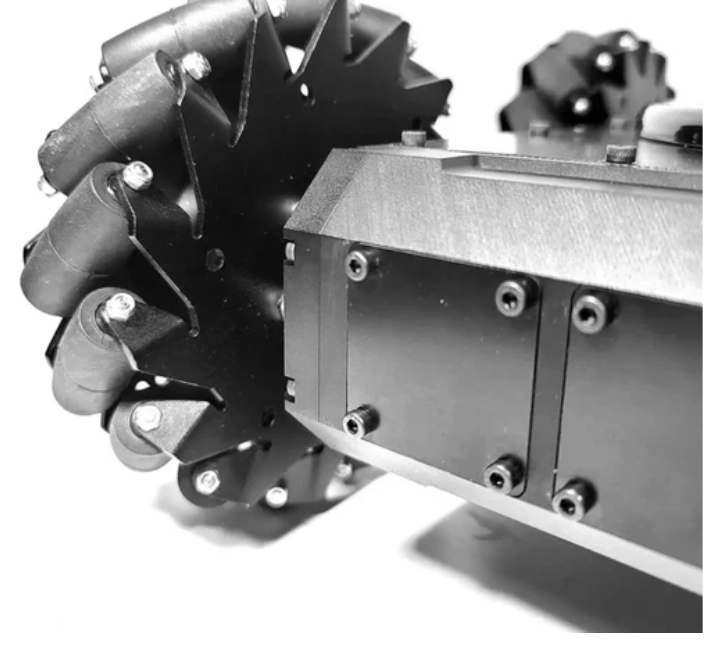
Lynxmotion - A4WD3 견고한 맥넘 로밍카 자율주행 키트
맥넘 구동, 마이크로컨트롤러 제어 이동 탐지차
방수 방진 밀봉 부품을 채용하다.
추진 시스템은 네 개의 행성 기어 모터와 152mm 맥넘 바퀴를 사용한다
모터 컨트롤러, 배터리 팩, 충전기 및 BotBoarduino 마이크로컨트롤러
조립 필요
Lynxmotion A4WD3 Rugged Mecanum Rover는 범용 모바일 로봇 플랫폼입니다.프레임워크에는 4WD,Mecanum & Tracked,각 플랫폼의 변형에는 전자 장치가 없는 버전이 포함됩니다. 따라서 설계자는 자체 부품을 통합할 수 있습니다.RC 버전과 마이크로컨트롤러 기반 버전으로 자체 또는 반자체 개발에 사용됩니다.
관련 상품









© cnebaymall-2023