


LiDAR 깊이 카메라가 장착된 Jetson Nano로 구동되는 Hiwonder JetHexa ROS Hexapod 키트는 SLAM 매핑 및 탐색을 지원합니다(프리미엄 키트)
(0
리뷰)
판매자:
Robo_space
Robo_space
가격:
$0.00
/0.5
환불하다:
공유하다:
베스트셀러 상품




- NVIDIA Jetson Nano 지원 및 ROS 기반
- 측량 및 탐색을 위한 심층 카메라 및 레이저 레이더 지원
- 업그레이드된 역운동학 알고리즘
- 딥 러닝 및 모델 트레이닝 능력
- 참고: 이것은 JetHexa 고급 키트입니다. 총 두 가지 버전으로 JetHexa 표준 키트는 단일 고화질 카메라를, JetHexa 고급 키트는 레이저 레이더와 심도 카메라를 탑재합니다.
- JetHexa 자습서 링크:https://drive.google.com/drive/folders/1YY5vy4sfUiNDoEkvPir-d634UZdzCQuT?usp=sharing
- 알림: 지도 및 탐색 기능은 JetHexa 고급 제품군에만 사용할 수 있습니다.
- 이 링크는 JetHexa Advanced Kit에 적용됩니다.https://www.robotshop.com/en/hiwonder-jethexa-ros-hexapod-robot-kit-powered-by-jetson-nano-with-lidar-depth-camera-support-slam-mapping-navigation-advanced-kit.html
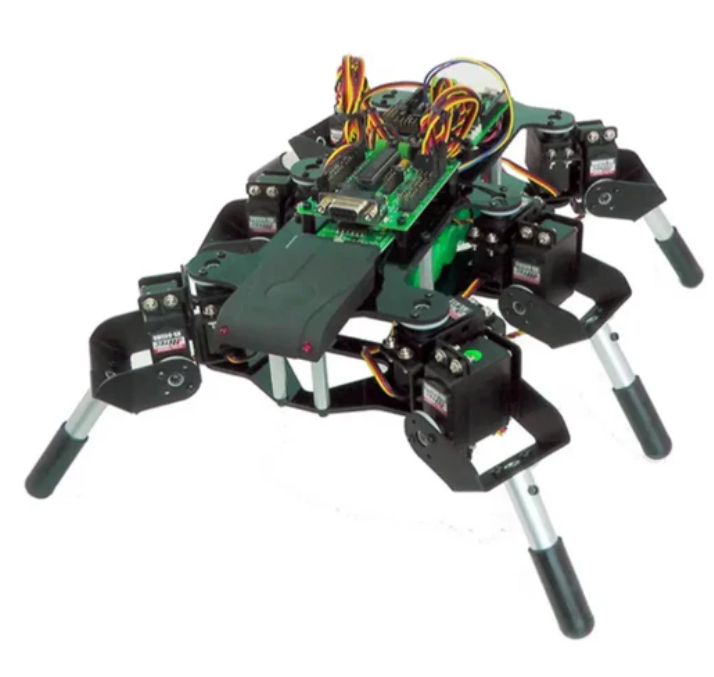
- JetHexa는 로봇 운영 체제 (ROS) 기반의 오픈 소스 6족 로봇으로 NVIDIA Jetson Nano, 스마트 직렬 버스 조타기, 레이저 레이더, 고화질 카메라/3D 심도 카메라 등 고성능 하드웨어를 탑재하여 로봇 운동 제어, 건도 네비게이션, 흔적 회피, 사용자 정의 투어, 인체 특징 식별, 체감 인터렉션 등의 기능을 실현할 수 있다.
- JetHexa는 새로운 역운동학 알고리즘을 사용하여 삼각대와 파문 스텝을 지원하며 고도로 구성 가능한 신체 자세, 높이 및 속도를 갖추고 있어 사용자에게 최고의 사용 경험을 선사할 것이다.
- JetHexa는 사용자에게 6족 로봇 움직임을 학습하고 검증하는 첨단 플랫폼뿐만 아니라 ROS가 개발한 솔루션도 제공합니다.사용자가 ROS 6족 로봇 세계의 새로운 여정에 오를 수 있도록 다양한 ROS 및 로봇 학습 자료와 자습서를 제공합니다.
- 1. Jetson Nano 제어 시스템
- NVIDIA Jetson Nano는 TensorFlow, PyTorch, Caffe/Caffe2, Keras, MXNet 등 주류 딥러닝 프레임워크를 실행할 수 있어 대량의 AI 프로젝트에 강력한 계산력을 제공한다.JetHexa에 Jetson Nano를 탑재하면 이미지 인식, 물체 감지 및 위치, 자세 추정, 의미 분할, 스마트 분석 등 만능 기능을 구현할 수 있다.
- 2. 싱글 카메라(2DOF 클라우드 포함)
- 싱글 카메라는 상하좌우 회전이 가능하며 컬러 추적, 자율주행 등이 가능하다.
- 3. 3D 심도 카메라
- 심도 카메라는 심도 지도 데이터를 처리하여 3D 시각 건도 네비게이션을 실현할 수 있다.
- 4. ROS 하이라이트
- 1) 2D 레이저 레이더 측량, 항법 및 장애물 회피:
- JetHexa는 고성능 EAI G4 레이저 레이더를 탑재하여 Cartographer, Hector, Karto, Gmapping 등 다양한 알고리즘을 사용하여 측량, 경로 계획, 지정 항법 및 항법 장애물을 피할 수 있도록 지원한다.
- 2) RTAB-VSLAM 3D 비주얼 매핑 및 탐색:
- JetHexa는 순수 RTAB 비주얼과 비주얼 및 레이저 레이더가 융합된 두 가지 방식의 3D 컬러 그래프를 지원하여 3D 지도에서 탐색하고 장애물을 피하며 전역 재배치를 수행할 수 있다.
- 3) 다중 탐색 및 장애물 회피:
- 레이저 레이더는 JetHexa가 여러 점을 탐색할 때 장애물을 피할 수 있도록 주변 환경을 실시간으로 탐지할 수 있다.
- 4) 깊이 이미지 데이터, 포인트 클라우드 이미지:
- 해당 API를 통해 JetHexa는 카메라의 깊이 이미지, 컬러 이미지 및 포인트 클라우드 이미지를 얻을 수 있습니다.
- 5) KCF 대상 추적:
- KCF 필터링 알고리즘을 기반으로 로봇은 선택한 대상을 추적할 수 있다.
- 6) 심층 카메라 장애물 인식:
- 심층 카메라를 사용하면 전방의 장애물을 감지하고 장애물을 통과할 수 있습니다.
- 7) 사용자 지정 경로 검색:
- 사용자는 경로를 사용자 정의하고 로봇에게 설계된 경로를 따라 걷도록 명령할 수 있습니다.
- 8) 레이저 레이더 추적:
- 레이저 레이더는 전방의 운동 물체를 스캔하여 로봇이 목표물을 추적할 수 있도록 한다.
- 9) 레이저 레이더 수비:
- 레이저 레이더는 주변 환경을 지키고 침입자가 감지되면 경보를 울리는 역할을 한다.
- 10) 색상 인식 및 추적:
- 이 로봇은 능숙하게 색상을 식별하고 추적할 수 있으며 색상에 따라 다른 동작을 수행할 수 있다.
- 11) 그룹 제어:
- 무선 핸들 하나로 JetHexa 그룹의 일관되고 동시에 작업을 제어할 수 있습니다.
- 12) 지능형 편대:
- 한 무리의 로봇들이 서로 다른 대형으로 순찰하는 것을 통제할 수 있다.
- 13) 협곡 횡단:
- 레이저 레이더가 전방의 협곡을 스캔하면 로봇은 자세와 방향을 조정해 협곡을 통과한다.
- 14) 자동 회선 추적:
- 로봇은 사용자가 지정한 색상 선을 인식하고 선을 따라 걸을 수 있습니다.
- 15) 태그 식별 및 추적:
- JetHexat는 여러 AR 태그를 동시에 식별하고 포지셔닝하는 데 능숙합니다.
- 16) 자세 검사:
- IMU 센서가 내장되어 있어 신체 자세를 실시간으로 감지할 수 있다.
- 5. 업그레이드된 역운동학 알고리즘(삼각대 걸음걸이/파문 걸음걸이):
- 원클릭 스텝 전환:
- JetHexa는 삼각대 스텝과 물결 스텝을 자유롭게 전환할 수 있습니다.
- 1) 정속 정고"달 산책":
- 역운동학 알고리즘을 통해 JetHexa는 SLAM 도면 작성 과정에서 안정을 유지하고 일정한 속도로 달 산책을 할 수 있습니다.
- 2) 넉백 각도 및 롤백 각도 조정:
- 고도로 배치할 수 있는 신체 자세, 중심, 푸시업 각도와 가로 스크롤 각도는 육발 로봇이 각종 복잡한 지형을 극복할 수 있도록 한다.
- 3) 방향, 속도, 높이 및 보폭 조정:
- JetHexa는 이동 중에 회전, 변도를 실현할 수 있으며 선 속도, 각 속도, 자세, 높이, 보폭의 무단 조정을 지원한다.
- 4) 신체의 자기 균형:
- 내장된 IMU 센서는 실시간으로 몸의 자세를 감지해 로봇이 관절을 조정하고 몸의 균형을 유지하도록 배치한다.
- 6.딥 러닝 및 모델 훈련 조력 인공지능 창조력
- JetHexa는 GoogLeNet, Yolo, mtcnn 등 신경망을 사용하여 딥 러닝 훈련 모델을 파악하고, 각종 모델을 로드하여 목표를 빠르게 식별함으로써 쓰레기 분류, 마스크 인식, 정서 인식 등 복잡한 AI 프로젝트를 실현한다.
- 1) 마스크 인식:
- 강력한 컴퓨팅 능력으로 JetHexa의 AI 기능은 딥 러닝을 통해 확장 될 수 있습니다.
- 2) 쓰레기 분류:
- 서로 다른 버려진 카드를 신속하게 식별하고 범주별로 해당 영역에 배치합니다.
- 3) 감정 인식:
- JetHexa는 얼굴 특징을 정확하게 식별하고 표정의 모든 미세한 차이를 포착할 수 있습니다.
- 6.MediaPipe 발전, AI 인터렉션 업그레이드
- JetHexa는 MediaPipe 프레임워크를 기반으로 인체 추적, 손 검사, 자세 검사, 전체 검사, 얼굴 검사, 3D 검사 등을 할 수 있다.
- 1) 손끝 궤적 제어
- 2) 인체 자세 제어
- 3) 제스처 인식
- 4) 3D 얼굴 검사
- 7.정자 시뮬레이션
- JetHexa는 ROS 프레임워크를 사용하여 Gazebo 시뮬레이션을 지원하며, Gazebo는 JetHexa를 제어하고 시뮬레이션 환경에서 알고리즘을 검증하여 실험 요구 사항을 줄이고 효율성을 향상시키는 새로운 방법을 제공합니다.
- 1) 차체 제어 시뮬레이션:
- 모방을 통해 운동학 알고리즘을 검증하여 알고리즘 오류로 인한 로봇의 손상을 피한다.
- 2) 시각 데이터:
- 시각 데이터를 제공하고, 로봇의 말단 및 중심 궤적을 관찰하며, 알고리즘을 최적화한다.
- 8. 다양한 제어 방법:
- 1)WonderAi APP
- 2) 지도 탐색 앱(Android에만 해당)
- 3) PC 소프트웨어
- 4) 무선 핸들
- - 다양한 제어 방법:
- -WonderAi APP
- - 지도 탐색 애플리케이션(안드로이드만 해당)
- -PC 소프트웨어
- - 무선 핸들
관련 상품









© cnebaymall-2023